

© Mano robótica ILDAUikium Kim y col.
Robert Klatte
Una nueva mano robótica con características casi humanas puede sostener casi cualquier objeto y utilizar diferentes herramientas.
Suwon (Corea del Sur). Desarrollar manos versátiles y contagiosas es uno de los mayores desafíos en robótica. Para algunas aplicaciones, las manos artificiales deben ser fuertes, mientras que otros escenarios de uso requieren un alto nivel de destreza. Además, las manos deben ser compatibles con los robots existentes. Esto es problemático porque las piezas adicionales a menudo dificultan la integración de las manos con los brazos del robot.
Los científicos de la Universidad de Ajou han presentado una nueva mano robótica que parece resolver estos problemas. La diestra antropomórfica integrada impulsada por vínculos (ILDA) es una mano robótica integrada, impulsada por articulaciones, diestra y relativamente humana. Mide 22 centímetros de largo y pesa alrededor de un kilogramo.
Agarra diferentes objetos
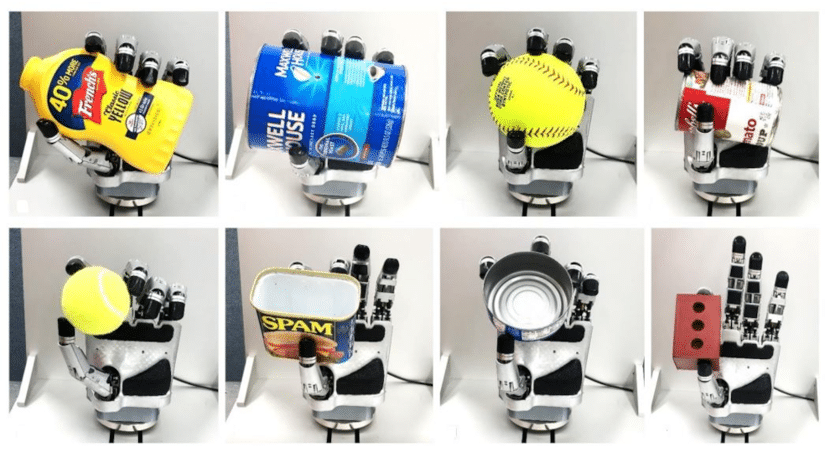
Según la publicación en la revista Nature Communications, la mano es extremadamente hábil y puede agarrar varios objetos. También se puede montar en brazos robóticos comerciales. 20 articulaciones con 15 grados de libertad garantizan la movilidad. Según el ingeniero Uikyum Kim, la mano aún puede acumular una fuerza de 34 Newtons en la punta de los dedos. Además, la mano robótica casi humana tiene capacidades sensoriales que le permiten adaptarse a casi cualquier objeto que se sostenga en la mano.
Tritura las latas y guarda los huevos
Según varios experimentos, la mano robótica ILDA puede, entre otras cosas, triturar latas sin esfuerzo, pero también sostener un huevo crudo frágil.
La mano del robot también es relativamente experta en el uso de herramientas como tijeras o alicates. Según los desarrolladores, todavía hay margen de mejora en términos de delicadeza.
Nature Communications, doi: doi.org/10.1038/s41467-021-27261-0



