

Los innovadores músculos artificiales pueden proporcionar a este pez robot un accionamiento inalámbrico. © Gravert et al. Progreso científico 2024
Hasta ahora, se necesitaban altos voltajes problemáticos para imitar el funcionamiento de sus modelos naturales. Pero ahora los investigadores han desarrollado músculos artificiales que pueden desarrollar fuerza de forma práctica. Gracias a un nuevo tipo de material de recubrimiento, sólo se requiere una tensión relativamente baja para encoger las bolsas llenas de aceite. Esto significa que pueden diseñarse para que sean más livianos, más robustos y con menos probabilidades de causar descargas eléctricas, como dejan claro los ejemplos de aplicaciones iniciales. En el futuro, afirman los científicos, esta tecnología podría conducir al desarrollo de robots optimizados, prótesis o los llamados dispositivos portátiles.
Estructuras duras y rígidas, accionadas por motores: además de estos sistemas convencionales, ahora en la robótica se han introducido conceptos más flexibles: las creaciones de la llamada robótica blanda se basan en materiales y procesos de la naturaleza. Gracias a sus características flexibles, estos desarrollos ofrecen una amplia gama de aplicaciones potenciales en la industria, la medicina o la investigación. Los desarrolladores también se inspiran en la naturaleza a la hora de guiar las piezas móviles de los robots blandos. En lugar de motores convencionales, se utilizan conceptos que imitan la función de los músculos. Se espera que, además de un movimiento suave, estos dispositivos también puedan ofrecer beneficios energéticos.
El sistema de músculos artificiales más potente hasta la fecha se basa estrictamente en el modelo biológico: son estructuras que se contraen al aplicar tensión, de forma similar a las fibras musculares provocadas por impulsos nerviosos. El músculo artificial consta de un saco lleno de líquido. El material de revestimiento especial permite provocar una deformación acortada de la bolsa mediante la aplicación de tensión, lo que genera una tensión de tracción. Combinando varias bolsas se puede formar un llamado actuador, capaz de proporcionar un movimiento similar al de un haz de fibras musculares.
Hasta ahora eran necesarias tensiones demasiado altas
Sin embargo, hasta ahora el concepto presentaba un problema: los actuadores sólo se contraen eficazmente cuando se aplican altas tensiones de entre 6.000 y 10.000 voltios. Esto significaba que los músculos artificiales tenían que conectarse a grandes amplificadores de alto voltaje, lo que hacía que el concepto fuera poco práctico para su uso en robots inalámbricos más pequeños. Además, era necesario garantizar un buen aislamiento de las unidades y los sistemas entrañaban el riesgo de sufrir peligrosas descargas eléctricas durante su manipulación. Por este motivo, el grupo de investigación dirigido por Stephan-Daniel Gravert del Instituto Federal de Tecnología de Zúrich (ETH Zurich) se dedicó a optimizar el concepto arte-músculo.
La ventaja central de su nuevo desarrollo es la necesidad de carga significativamente menor. Esto es posible gracias a una capa de un material ferroeléctrico especial en la innovadora estructura de la carcasa de las bolsas. Tiene una permitividad particularmente alta. Se refiere a la capacidad que tiene un material de polarizarse mediante campos eléctricos. Gracias a su alta permitividad, el material utilizado puede absorber energía eléctrica de forma muy eficaz y generar así fuertes fuerzas de atracción con un voltaje relativamente bajo, explican los investigadores. “En otros actuadores, los electrodos se encuentran en el exterior de la carcasa. Nuestro caparazón se compone de varias capas. «Combinamos el material ferroeléctrico de alta permitividad con una capa de electrodos y luego los cubrimos con una cubierta de polímero que tiene excelentes propiedades mecánicas y hace que la bolsa sea más estable», dice Gravert.
Al parecer, ahora son suficientes menos de 1.000 voltios para garantizar una activación efectiva de los actuadores.

A esta tensión se contraen las paredes polarizadas diferentemente en la parte superior de las bolsas. Al hacerlo, empujan el aceite hacia la zona inferior del músculo artificial, provocando que se hinche. Esto está asociado a un acortamiento de toda la unidad, lo que puede provocar tensiones de tracción.
Potencial de aplicación demostrado
Para ilustrar el potencial de su sistema, los desarrolladores lo utilizaron en dos ejemplos de aplicación. Se trata de un robot de agarre de once centímetros de altura en el que se mueven dos dedos a través de tres bolsas del nuevo sistema de accionamiento conectadas en serie. Una batería integrada y una fuente de alimentación proporcionan la tensión necesaria de 900 voltios. Toda la pinza, incluida la electrónica de potencia y control, pesa 45 gramos y con este dispositivo el equipo pudo demostrar que el sistema es capaz de levantar su propio peso sobre una cuerda. “Este ejemplo muestra muy bien lo pequeños, ligeros y eficientes que son estos actuadores. Esto también significa que hemos dado un gran paso hacia el objetivo de crear sistemas integrados impulsados por músculos”, afirma el autor principal Robert Katzschmann de ETH Zurich.
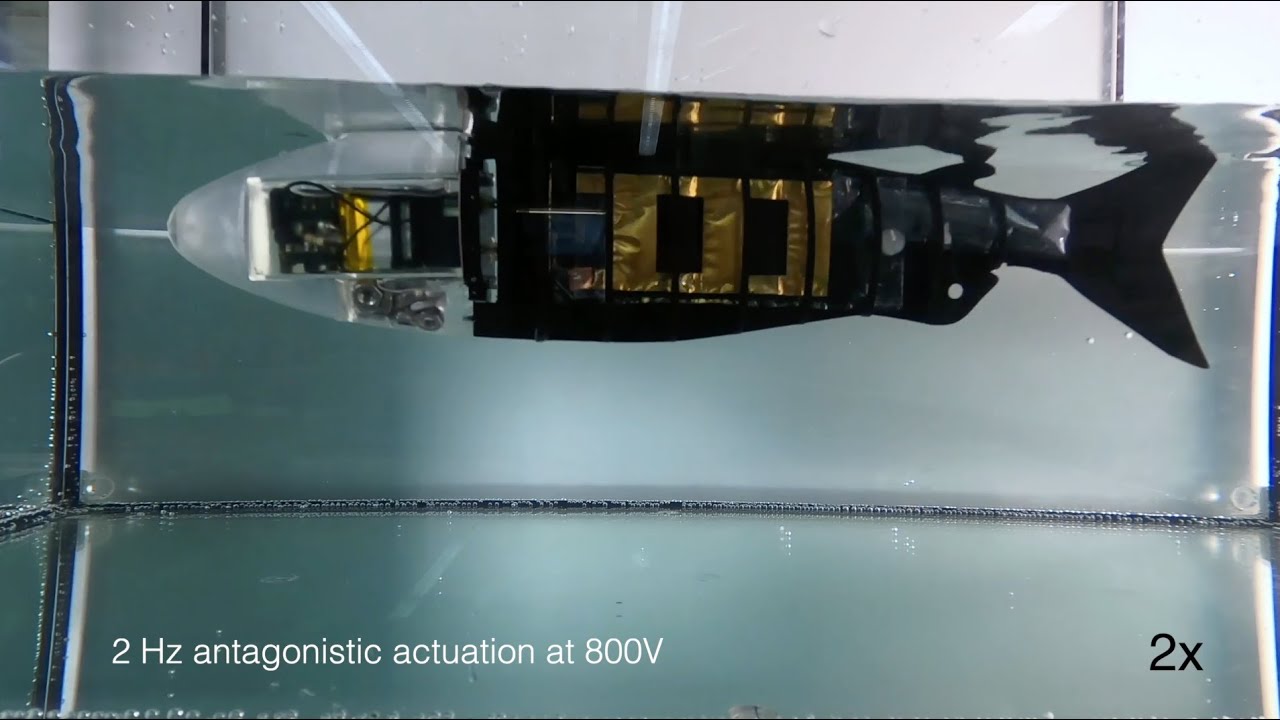
El segundo ejemplo de aplicación es un pez robot de aproximadamente 30 centímetros de largo. La electrónica de control está situada en el cabezal, conectada a los dos actuadores integrados en los laterales. Su activación alterna crea movimientos de natación que pueden llevar al pez robot operado de forma inalámbrica desde el reposo a una velocidad de tres centímetros por segundo en 14 segundos. Funciona con agua corriente del grifo, lo que habría causado problemas de aislamiento en versiones anteriores de los músculos artificiales. “Con los peces podemos demostrar que los electrodos están protegidos del medio ambiente y, viceversa, el medio ambiente también permanece protegido del voltaje. «Estos actuadores electrostáticos se pueden manejar y tocar en el agua», afirma Katzschmann. Los desarrolladores señalan que los nuevos actuadores también son significativamente más robustos que otros sistemas de músculos artificiales.
Según ellos, el concepto tiene ahora un potencial considerable para el desarrollo de nuevos tipos de robots, prótesis o tecnologías portátiles. Finalmente Katzschmann afirma: “Ahora es necesario llevar esta tecnología a la madurez industrial. Sin querer revelar demasiado, puedo decir que ya hay interés por parte de empresas que quieren trabajar con nosotros», afirma satisfecho el científico.
Fuente: Instituto Federal de Tecnología de Zurich, artículo especializado: Science Advances, doi: 10.1126/sciadv.adi9319



